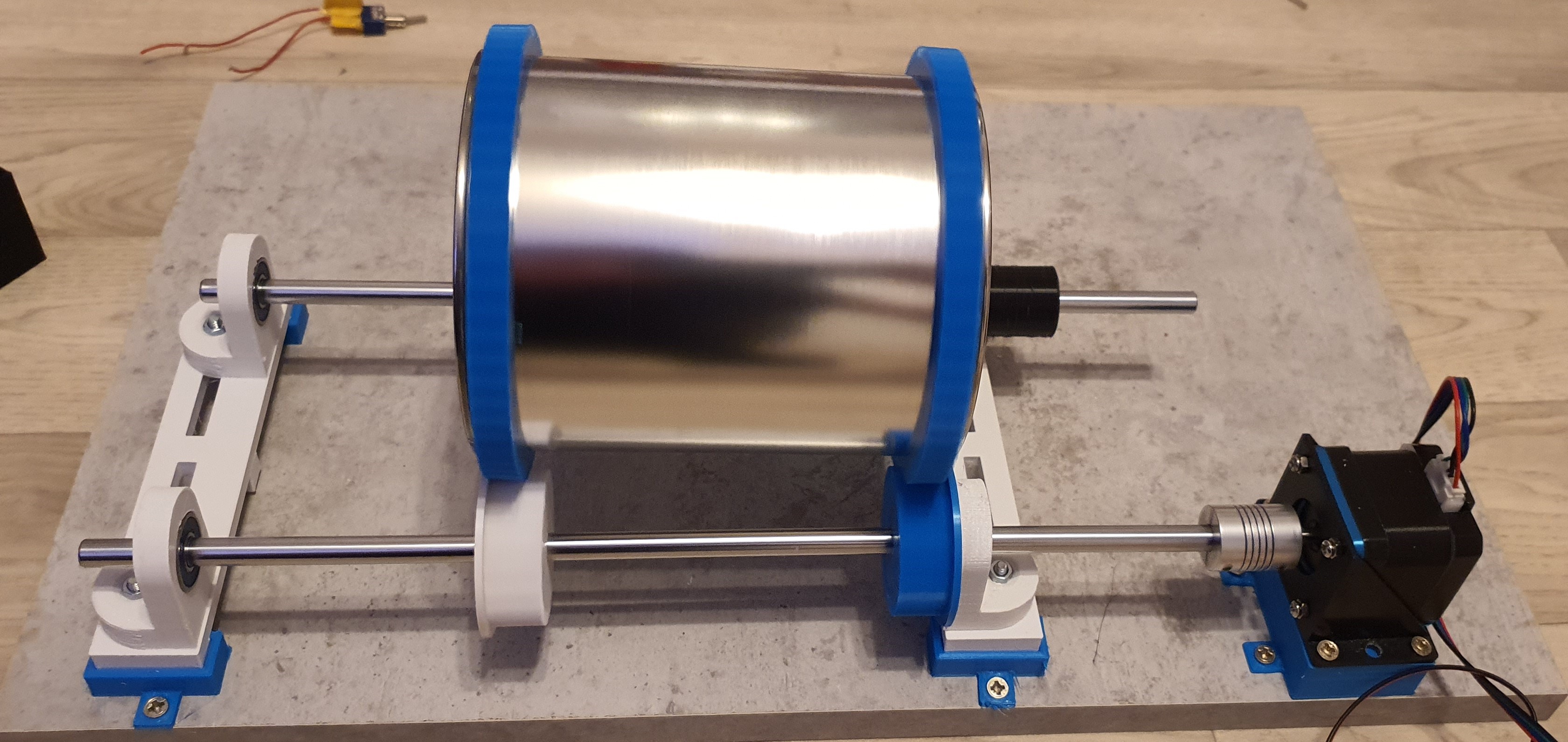
Meine Idee, ein simples Design was mittel Nema 17 Motor angetrieben werden soll,
das System sollte variable sein, sprich es kann mehrere Größen aufnehmen ohne neue Teile anbauen zu müssen. Heißt im Detail, ich kann die Wellen mit zwei Schrauben lösen und verschieben.
Ich musste für die Umsetzung nichts dazu kaufen, die benötigten Teile hatte ich noch in meinem Arbeitszimmer liegen.
Eine Stückliste ist beigefügt!
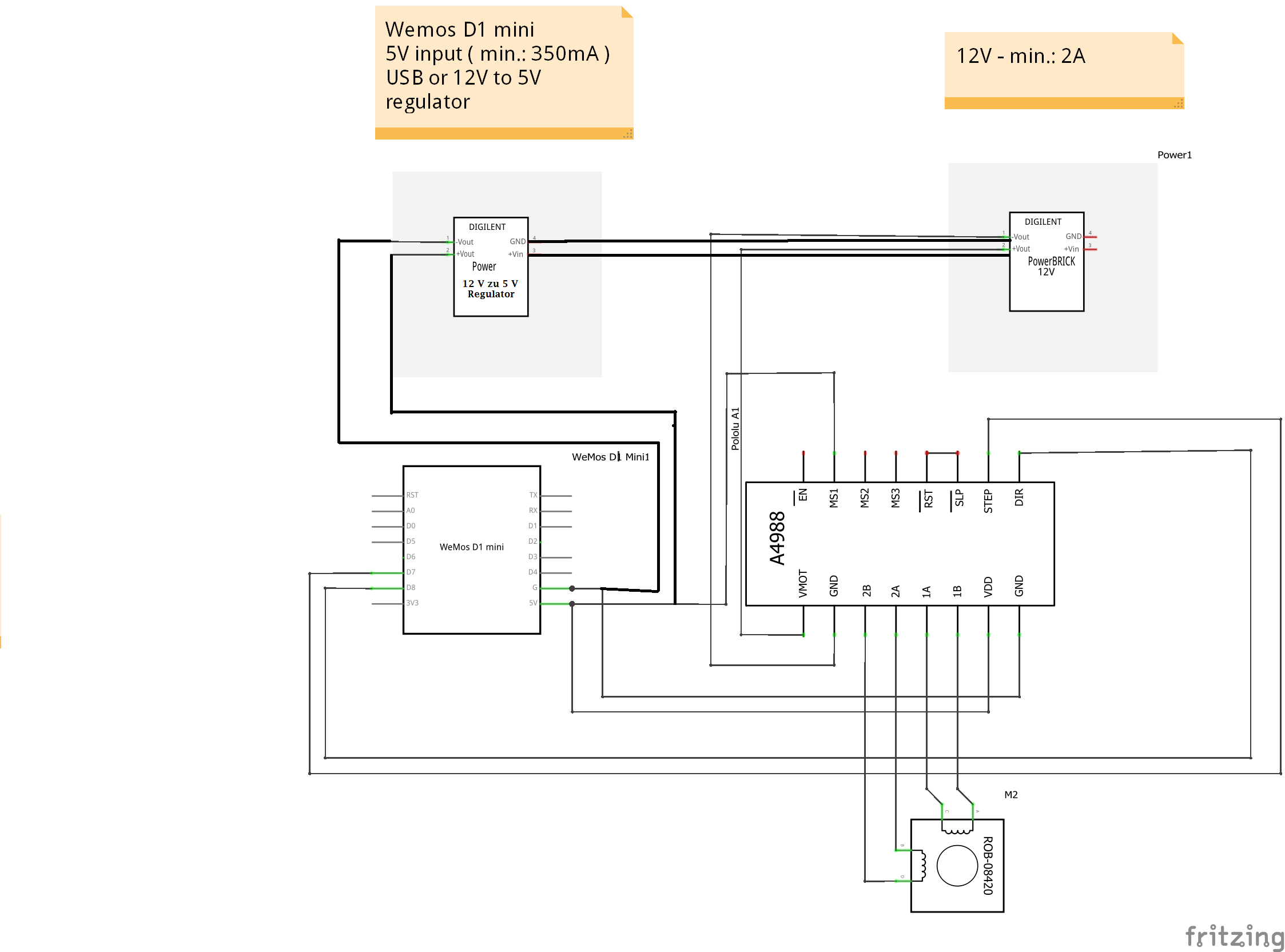
Ein Schaltplan ist beigefügt!
Ein Arduino-Basiscode ist beigefügt!
Es wird ein 3D Drucker benötigt, alternativ einen Druckservice nutzen.
1.: stecken wir die Kugellager in die Lagerblöcke.
2.: stecken wir die Zahnräder auf die Wellen ( Abstand muss zu eurer Dose passen! )
3.: richten die Wellen Parallel zu einander aus und machen uns mittels Bodenplatte eine Markierung und schrauben die Halterung_Bodenplatte an ( 4 x )
4.: verschrauben die Lagerblöcke mit der Bodenplatte
5.: Legen die Bodenplatte in die Halterung_Bodenplatte
6.: fummeln uns vorsichtig die Wellen in die Kugellager
7.: richten die Länge aus ( orientiert euch hier an dem Nema 17 und der Kupplung )
8.: wir verschrauben die Bodenplatte_Nema17
9.: wir verschrauben den Nema 17 mit der Bodenplatte_Nema17
10.: wir ziehen die Kupplung an wenn alles flüssig läuft, sollte es dies nicht tun, muss neu ausgerichtet werden!